Coordinate frames¶
The driver publishes three TF transforms between these frames: odom, ${base_prefix}_link, ${base_prefix}_frontcam and ${tf_prefix}/${base_prefix}_bottomcam. The ${base_link} is the shared name prefix of all three reference frames and can also be set using Parameters, by default it has the value of ardrone_base.
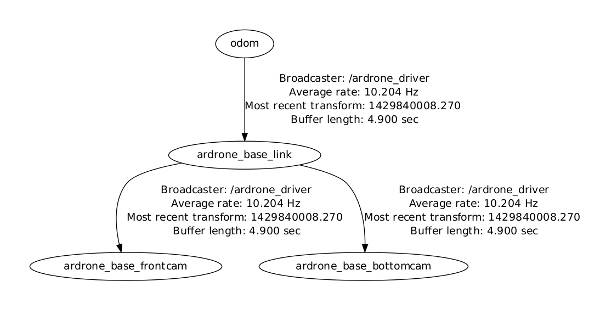
The frame_id field in header of all published topics (navdata, imu, cameras) will have the appropriate frame names. All frames are ROS REP 103 compatible.